بروتوكول التوجيه EIGRP
نتج عن تاريخ IPv4 الطويل تنافس وظهور العديد من بروتوكولات البوابة الداخلية للتوجيه (IGP). تختلف عن بعضها في بعض النواحي والتي تشمل مثلاً الخوارزميات الأولية للتوجيه مثل حالة الارتباط (link state) ومتجه المسافة (distance vector). تناقش بداية هذه الورقة كيفية عمل EIGRP كبروتوكول توجيه متجه المسافات إلى حد ما بينما في نفس الوقت لا يتوافق بسهولة مع أي فئة على الإطلاق.
يضع هذا القسم بروتوكول EIGRP في مقابل بروتوكولات التوجيه الشائعة الأخرى ثم يبحث في مفاهيم متجه المسافة (DV) الأساسية كما نُفذت مع بروتوكول RIP. يساعد استخدام RIP في تعلم الأساسيات لمناقشة مفاهيم متجه المسافة (DV). ثم مناقشة كيفية استخدام EIGRP لميزات متجه المسافة (DV) ولكن بطريقة أكثر فاعلية من استخدام RIP لها.
مقدمة لـ EIGRP
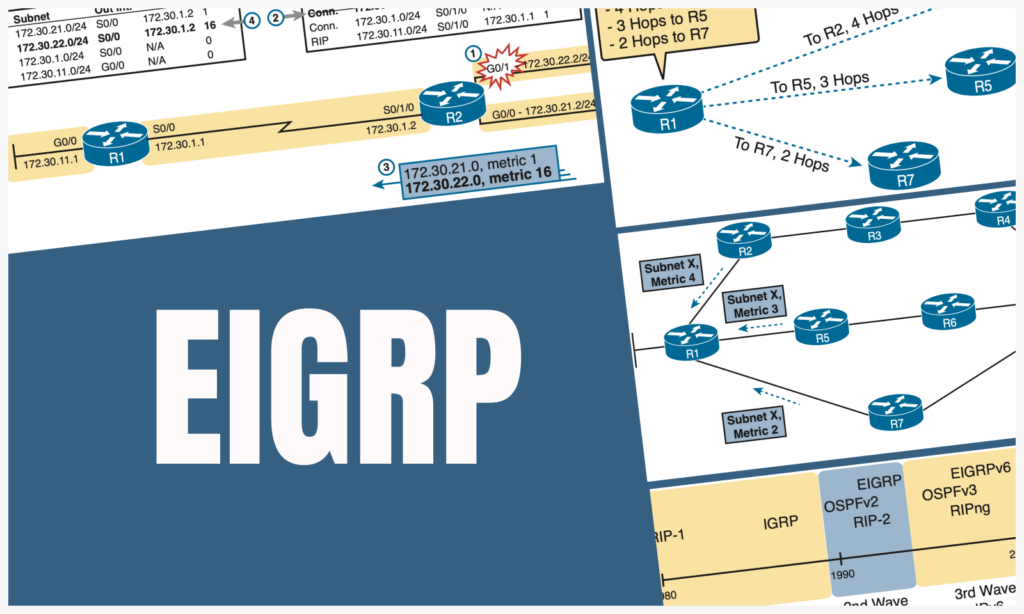
من الناحية التاريخية استخدمت بروتوكولات التوجيه الأولى منطق متجه المسافة (DV). وقد كان الإصدار الأول من RIP (RIPv1) هو أول بروتوكول توجيه شائع الاستخدام حيث ظهر بروتوكول التوجيه للبوابة الداخلية (IGRP) والخاص بشركة Cisco بعد ذلك بقليل كما هو موضح في الشكل أدناه.

بحلول أوائل التسعينيات وبسبب عوامل متعددة برزت موجة ثانية من بروتوكولات التوجيه الأفضل فقد كان لدى RIPv1 و IGRP بعض القيود التقنية وعلى الرغم من أنها كانت خيارات رائعة في حينها إلا أن العالم احتاج إلى بروتوكولات توجيه أفضل بسبب الاعتماد الأكبر على TCP/IP وتوسع نطاقها في شبكات المؤسسات في التسعينيات فقد انتقلت العديد من المؤسسات من الشبكات القديمة المملوكة للغير لاستخدام الشبكات التي تم إنشاؤها ذاتياً باستخدام أجهزة التوجيه والشبكات المحلية و TCP/IP.
حينها احتاجت هذه الشركات إلى أداء أفضل في بروتوكولات التوجيه الخاصة بها بما في ذلك موضوع مقاييس أفضلية المسارات وكذلك إعادة بناء المسارات عند وجود أي أعطال. أدت كل هذه العوامل إلى إدخال موجة جديدة من بروتوكولات التوجيه الداخلية فظهر الإصدار الثاني لـ RIP (RIPv2) وكذلك OSPF و EIGRP.
إلى اليوم لا يزال بروتوكولي التوجيه EIGRP و OSPF هما اللاعبان الأساسيان كبروتوكولات توجيه مستخدمة في الشبكات فقد تراجعت RIPv2 كمنافس جاد لهما ويرجع ذلك إلى حدٍ ما إلى مقياس قفزاتها الأقل قوة وإلى بسبب وقتها الأبطأ في إعادة بناء المسارات عند وجود أي أعطال.
فمع وجود العديد من بروتوكولات التوجيه كيف يختار مهندس الشبكة بروتوكول التوجيه الأنسب والذي يجب استخدامه؟ للإجابة على ذلك ضع في اعتبارك نقطتين أساسيتين حول EIGRP تدفع غالباً المهندسين إلى استخدامها:
■ تستخدم EIGRP مقياسًا قويًا يعتمد على كل من عرض النطاق الترددي وعلى عنصر الوقت والتأخير ، لذلك تتخذ أجهزة التوجيه اختيارات جيدة حول أفضل مسار للاستخدام.
■ لدى EIGRP وقت سريع في إعادة بناء المسارات عند وجود أي أعطال ، مما يعني أنه عندما يتغير شيء ما في الشبكة البينية تجد EIGRP بسرعة أفضل المسارات الخالية من الاشكالات.
على سبيل المثال يستخدم RIP مقياساً أساسياً يعتمد على عدد القفزات مما يعني عدد أجهزة التوجيه بين الشبكة الفرعية الوجهة وجهاز التوجيه المحلي. يؤدي هذا المقياس إلى اختيار المسار الأقل عدد قفزات حتى لو كانت هذه الروابط روابط بطيئة لذلك قد يختار RIP مساراً ضعيفاً ويعتبر أنه أفضل مسار في حين يستخدم EIGRP في مقاييسه صيغة رياضية تتجنب المسارات ذات الروابط البطيئة من خلال إعطاء هذه المسارات مقاييس أسوأ أي قيم أعلى يوضح الشكل أدناه الفكرة.

منذ دخول EIGRP في التسعينيات وحتى عام 2013 كان أحد السلبيات الكبرى بشأنها هو أن Cisco احتفظت بهذا البروتوكول كبروتوكول خاص بها وكنتيجة لذلك فلتشغيل EIGRP عليك شراء أجهزة توجيه من Cisco. وفي نقله رائعة نشرت Cisco معلومات EIGRP كمستند RFC عام مما يعني أنه يمكن الآن لجميع المصنعين لأجهزة التوجيه اختيار تنفيذ EIGRP أيضًا. في الماضي كانت العديد من الشركات تختار استخدام OSPF بدلاً من EIGRP لمنح نفسها مزيد من الحرية في اختيار أجهزة التوجيه خاصتهم. ومن المتوقع في المستقبل إمكانية شراء بعض أجهزة التوجيه من Cisco وبعضها من بائعين آخرين وتشغيل EIGRP على جميع أجهزة التوجيه.
وعلى أي حال لا يزال الى اليوم EIGRP و OSPF يمثلان الخيارين الأفضل لبروتوكولات التوجيه الداخلية. فكلاهما يعيد رسم مساراته بسرعه اذا حصل أي تغيير وكلاهما يستخدم مقياساً جيداً يأخذ في الاعتبار سرعة نقل البيانات عند اختيار المسار. وقد تكون EIGRP أسهل بكثير في التنفيذ من نظيرتها. فقد أجريت العديد من المقارنات بينهما على مر السنين واختار البعض OSPFv2 وآخرون اختاروا EIGRP.
ميزات بروتوكول التوجيه متجه المسافات الأساسية
لا يتوائم EIGRP بشكل كامل مع فئة بروتوكولات متجه المسافة (DV) أو بروتوكولات حالة الارتباط (LS). إلا أنه يميل بشكل أقرب وأوثق مع بروتوكولات متجه المسافات (DV). سنتطرق قليلاً لأساسيات بروتوكولات متجه المسافة (DV) كما تم تنفيذها في الأصل مع RIP وذلك لإعطاء إطار مرجعي لكيفية عمل بروتوكولات (DV). ستُظهر الأمثلة التالية المسارات التي تستخدم مقياس قفزات RIP البسيط والذي على الرغم من كونه خياراً ضعيفاً في الشبكات الحقيقية اليوم ألا أنه يعد خيار أبسط بكثير للتعلم من مقياس EIGRP الأكثر تعقيدًا.
مفهوم (متجه) و (المسافة)
يصف مصطلح متجه المسافة (DV) ما يفترض أن يعرفه جهاز التوجيه عن كل مسار. ففي نهاية الاجراءات وعندما يتعرف جهاز التوجيه على مسار ما إلى شبكة فرعية فكل ما يعرفه جهاز التوجيه هو بعض قياسات المسافة (metric) وموجه القفزة التالية والمنفذ المُصدّر للحزمة وذلك لاستخدامها في هذا المسار (متجه (vector) ، أو اتجاه (direction)).
يوضح الشكل أدناه عرضاً لكل من المتجه والمسافة كما تم تعلمه باستخدام RIP. ويوضح الشكل تدفق رسائل RIP التي تجعل R1 يتعلم بعض المسارات وتحديداً ثلاثة مسارات للوصول إلى الشبكة الفرعية X:
■ مسار القفزات الأربع عبر R2
■ مسار القفزات الثلاث عبر R5
■ مسار القفزين عبر R7

تتعرف بروتوكولات متجه المسافة (DV) على جزأين من المعلومات حول مسار محتمل للوصول إلى شبكة فرعية: المسافة (metric) والمتجه (موجه القفزة التالية). وفي هذه الحالة يتعرف R1 ثلاثة مسارات للوصول إلى الشبكة الفرعية X. ولن يكون هناك حيرة أبدً لو كان هناك مسار واحد فقط لشبكة فرعية محدد لأن الموجه سيختار هذا المسار الواحد. ومع ذلك وفي المسارات الثلاثة المحتملة في هذه الحالة سيختار R1 المسار المكون من قفزتين وذلك من خلال القفزة الأولى باتجاه جهاز التوجيه R7 لأن هذا المسار يحتوي على أقل مقياس RIP.
بينما يوضح الشكل السابق كيفية تعرف R1 على المسارات باستخدام تحديثات RIP فإن الشكل التالي يعطي رؤية أفضل للمنطق المستخدم في متجه المسافة لـ R1 فهو يتعرف على ثلاثة مسارات لكل منها
المسافة (Distance): المقياس المحتمل للمسار.
المتجه (Vector): الاتجاه وذلك استناداً إلى موجه القفزة التالية لمسار محتمل.
لاحظ أن R1 لا يعرف معلومات أخرى حول بنية وهيكلية الشبكة. على عكس بروتوكولات حالة الارتباط (LS) فإن منطق بروتوكولات متجه المسافة (DV) الخاص بـ RIP ليس لديه فكرة عن الهيكل العام وبدلاً عن ذلك يعرف فقط أجهزة التوجيه والمقاييس للقفزة التالية.

رسائل الـ Full Update والـ Split Horizon
تحتوي بروتوكولات متجه المسافة (DV) على وظيفتين تتطلبان رسائل بين أجهزة التوجيه المجاورة.
أولاً تحتاج أجهزة التوجيه إلى إرسال معلومات التوجيه داخل بعض الرسائل وذلك ليتمكن جهاز التوجيه المرسل من الإعلان عن معلومات التوجيه التي عنده إلى أجهزة التوجيه المجاورة.
ثانياً تحتاج أجهزة التوجيه إلى مراقبة ما إذا كان كل جهاز توجيه مجاور لا يزال يعمل أم لا وتقوم أجهزة التوجيه بذلك عن طريق إرسال واستقبال رسائل منتظمة مع كل جار. ومن خلال الإدراك والتنبه السريع في حال فشل جهاز التوجيه المجاور يمكن لأجهزة التوجيه أن تعدل وتغير مساراتها بسرعة أكبر وذلك لاستخدام المسارات التي لا تزال متاحة.
جميع بروتوكولات التوجيه تمتلك بعض الآليات لمراقبة حالة أجهزة التوجيه المجاورة فيستخدم OSPF مثلاً رسائل (Hello) في فترة زمنية قصيرة نسبياً 10 ثوانٍ بشكل افتراضي وتستخدم EIGRP أيضًا رسائل (Hello) وبنفس الإجراءات. ومع ذلك فإن بروتوكولات متجه المسافة (DV) الأساسية القديمة مثل RIP لا تستخدم نوعاً منفصلًا من رسائل (Hello) وبدلاً من ذلك تستخدم نفس رسائل التحديث للإعلان عن معلومات التوجيه والاطلاع على ما إذا كان جهاز التوجيه المجاور لا يزال يعمل. بمعنى آخر تتم وظيفتي الإعلان عن معلومات التوجيه الإعلان ومراقبة حالة الجوار بنفس رسالة التحديث.
ترسل بروتوكولات متجه المسافة (DV) الأساسية القديمة مثل RIP تحديثات توجيه كاملة بشكل دوري بناءً على فترة زمنية قصيرة نسبيًا. يعني (Full update) أن جهاز التوجيه يعلن عن جميع مساراته باستخدام رسالة أو أكثر من رسائل تحديث RIP بغض النظر عما إذا كان المسار قد تغير أم لا وتعني (Periodic) أن جهاز التوجيه يرسل الرسالة بناءً على فترة زمنية قصيرة وهي 30 ثانية في حالة RIP
يوضح الشكل التالي هذا المفهوم في الشبكة مع جهازي توجيه وثلاث شبكات فرعية LAN وشبكة واحدة فرعية WAN. ويوضح الشكل كذلك جداول التوجيه الكاملة لجميع أجهزة التوجيه بالإضافة إلى عرض التحديثات الكاملة الدورية التي يرسلها كل جهاز توجيه.

يوضح هذا الشكل الكثير من المعلومات لذا فهو يحتاج إلى تأمل في تفاصيله. على سبيل المثال ضع في اعتبارك ما تعرف عليه جهاز التوجيه R1 بشأن الشبكة الفرعية 172.30.22.0/24 وهي الشبكة الفرعية المتصلة بالمنفذ G0/1 للموجه R2 :
1. المنفذ G0/1 للموجه R2 يمتلك عنوان IP وهي في حالة تشغيل up/up.
2. يضيف R2 لجدول توجيهه مسارًا متصلًا لـ 172.30.22.0/24 وذلك خروجاً من المنفذG0/1
3. يعلن R2 عن مساره من 172.30.22.0/24 إلى R1 باستخدام المقياس 1 والذي يعني أن مقياس R1 للوصول إلى هذه الشبكة الفرعية سيكون الـ metric رقم 1 أي أن (عدد القفزات 1).
4. يضيف R1 مساراً للشبكة الفرعية 172.30.22.0/24 ويدرجه كمسار تعرف عليه عن طريق RIP باستخدام المقياس 1.
تأمل قليلاً في المسار الذي تم التعرف عليه في الخطوة 4 أعني المسار الغامق في جدول توجيه R1 هذا المسار هو 172.30.22.0/24 كما تعرف عليه عن طريق R2. يظهر كذلك منفذ S0/0 المحلي والخاص بـ R1 كمنفذ مصدر للحزم وذلك لأن R1 يتلقى التحديث على ذلك المنفذ كما يظهر أيضاً عنوان IP لـ R2 وهو 172.30.1.2 على أنه جهاز توجيه القفزة التالية لأنه عنوان IP الذي تعرف R1 عن طريقه المسار.
انظر بعد ذلك إلى الجزء السفلي من الشكل والذي يعرض رسالة تحديث RIP المستخدمة لمراقبة حالة الجوار بحيث تكرر أجهزة التوجيه نفس رسالة التحديث بالضبط بناءً على مؤقتات زمنية مدتها 30 ثانية. وعليه فإنه في هذه الشبكة إذا لم يتغير شيء لمدة عام فإن RIP سيجعل أجهزة التوجيه تكرر نفس المعلومات كل 30 ثانية مع بعضها البعض. وذلك لأنه إذا فشل جهاز التوجيه في تلقي رسائل التحديث لفترة زمنية محددة فإن جهاز التوجيه سيعرف أن الجار الصامت قد تعطل.
أخيرًا يوضح الشكل مثالًا على ما يسمى (Split Horizon). لاحظ أن كلا جهازي التوجيه يعرضان جميع الشبكات الفرعية الأربع في جداول التوجيه الخاصة بهما إلا أن رسائل تحديث RIP لا تعرض الأربع شبكات فرعية. والسبب أن (Split horizon) هي ميزة متجه المسافة (DV) التي تخبر بروتوكول التوجيه بعدم الإعلان عن بعض المسارات في رسائل التحديث المرسلة إلى منفذ ما. وهذه المسارات هي التي تعرض نفس المنفذ المُصدِّر للحزمة. عادةً ما تكون تلك المسارات التي لم يتم الإعلان عنها على المنفذ هي المسارات التي تم التعرف عليها في التحديثات الواردة إلى ذلك المنفذ.
من الصعب تعلم (Split horizon) من خلال القراءة فقط وكما يقال بالمثال يتضح المقال. فيستمر الشكل أدناه لنفس المثال السابق ولكن مع التركيز على تحديث RIP الخاص بـ R1 والصادر من منفذها رقم S0/0 باتجاه R2. يوضح هذا الشكل جدول توجيه R1 بثلاثة مسارات ذات ألوان فاتحة وكلها تدرج S0/0 كمنفذ مصدر للحزم. عند تحديث بيانات RIP لإرسالها عبر S0/0 تعمل قواعد (Split horizon) وتجعل R1 يتجاهل تلك المسارات ذات الألوان الفاتحة لأن جميع المسارات الثلاثة تدرج S0/0 كمنفذ مصدر للحزم. فيمكن فقط تضمين المسار الغامق والذي لا يدرج S0/0 كمنفذ مصدر للحزم في تحديث RIP المرسل عبر S0/0.

تسميم المسار
تساعد بروتوكولات متجه المسافة (DV) على منع الدوران في حلقات التوجيه وذلك من خلال التأكد من أن كل جهاز توجيه قادر على معرفة أن المسار قد فشل وذلك من خلال كل الوسائل الممكنة وفي أسرع وقت ممكن. إحد هذه الميزات هي ما يسمى بتسمم المسار (route poisoning) بحيث تساعد جميع أجهزة التوجيه على معرفة فشل المسار والتأكد من ذلك.
يشير الـ (route poisoning) إلى الإعلان عن مسار فاشل ولكن بإعطائه قيمة مترية خاصة تسمى اللانهاية (infinity). وتعتبر أجهزة التوجيه أن المسارات التي تم الإعلان عنها باستخدام مقياس لانهائي هي مسارات قد فشلت. يوضح الشكل أدناه مثالاً لتسمم المسار باستخدام RIP مع فشل المنفذ G0/1 للموجه R2 مما يعني أن مسار R2 لـ 172.30.22.0/24 قد فشل. يعرّف RIP اللانهاية بالقيمة 16.
يوضح الشكل أدناه العمليات التالية:
1. فشل المنفذ G0/1 لجهاز التوجيه R2.
2. يزيل R2 مساره المتصل بـ 172.30.22.0/24 من جدول التوجيه الخاص به.
3. يعلن R2 عن 172.30.22.0 بمقياس لانهائي (وهو 16 لـ RIP).
4. اعتماداً على الظروف الأخرى يزيل R1 المسار إلى 172.30.22.0 فوراً من جدول التوجيه الخاص به أو يضع علامة على المسار على أنه غير قابل للاستخدام (بمقياس لانهائي) لبضع دقائق قبل إزالة المسار.
بنهاية هذه العملية يعرف جهاز التوجيه R1 بالتأكيد أن مساره القديم للشبكة الفرعية 172.30.22.0/24 قد فشل مما يساعد R1 على عدم الوقوع في مشكلة الدوران في حلقات التوجيه.

كل بروتوكول توجيه له تعريفه الخاص للمقياس اللانهائي. فيستخدمRIP المقياس 16. في حين استخدمت EIGRP المقياس 232-1 باعتباره اللانهاية (وهي قيمة تزيد قليلاً عن 4 مليار). ويستخدم OSPFv2 المقياس 224-1 على أنه المقياس اللانهائي.
EIGRP كبروتوكول متجه المسافة (DV) المتقدم
تعمل EIGRP إلى حدٍ ما مثل بروتوكولات متجه المسافة (DV) وإلى حدٍ ما كبروتوكول توجيه آخر. فعلى مر السنين قامت وثائق Cisco المختلفة والكتب المختلفة كذلك بتمييز EIGRP إما كجعلها نوع خاص يسمى بروتوكول التوجيه الهجين المتوازن أو كنوع من بروتوكول متجه المسافة (DV) لكنه متقدم.
بغض النظر عن التسمية المعطاة كتصنيف لـ EIGRP يستخدم البروتوكول العديد من الميزات التي تعمل مثل بعض بروتوكولات متجه المسافات الأخرى مثل RIP. وستتناول الصفحات القليلة التالية بعض أوجه التشابه والاختلاف بين RIP و EIGRP.
EIGRP ترسل رسائل تحديث جزئية وحسب الحاجة
لا تستخدم EIGRP مؤقت زمني دوري مثل RIP. وبدلاً من ذلك ترسل EIGRP معلومات حول كل مسار مرة واحدة وعندما يتعرف جهاز التوجيه على المعلومات يرسل جهاز التوجيه بعد ذلك تحديثات جزئية فقط. وهذه التحديثات الجزئية لـ EIGRP هي رسائل تحديث تعرض أي معلومات جديدة أو معلومات تم تغييرها حول المسار. على سبيل المثال عند فشل منفذ جهاز التوجيه ستتأثر بعض المسارات حينها يرسل جهاز التوجيه رسالة تحديث جزئية فورية إلى أي أجهزة توجيه EIGRP أخرى مجاورة مع توضيح المعلومات الجديدة. ويتم ذلك أيضاً عندما تتوفر مسارات جديدة فيقوم جهاز التوجيه بإرسال رسائل تحديث جزئي حول المسارات الجديدة فقط. ورسائل التحديث هذه ليست تحديثات كاملة لأنها تحتوي فقط على معلومات متغيرة أو جديدة.
تعمل الفكرة إلى حد ما مثل دور OSPF عند إغراق الشبكة والإعلان لحالة الارتباط (LSA) مرة واحدة داخل المنطقة. ومع ذلك فإن جهاز التوجيه الذي ينشئ الـ (LSA) يعيد غمر هذا الـ (LSA) كل 30 دقيقة. بينما لا تهتم EIGRP حتى بإعادة ارسال معلومات التوجيه الخاصة بها. فعلى سبيل المثال إذا لم تتغير معلومات التوجيه حول مسار EIGRP لمدة عام فستظل EIGRP صامتة تماماً حول هذا المسار في رسائل التحديث الخاصة بها لتلك السنة بأكملها بعد إعلانها لأول مرة.
تحافظ EIGRP على معرفة حالة الجار باستخدام رسائل “Hello“
لا ترسل EIGRP رسائل تحديث كاملة أو جزئية اعتماداً على مؤقت زمني دوري لذا لا يمكن لـ EIGRP الاعتماد على رسائل التحديث لمراقبة حالة الجيران. ولذلك لدى EIGRP رسائل الترحيب بحيث تحدد رسالة EIGRP Hello أن كل جهاز توجيه يجب أن يرسل رسالة ترحيب دورية على كل منفذ والتي تمكن جميع أجهزة توجيه EIGRP من معرفة أن جهاز التوجيه لا يزال يعمل. ويوضح الشكل أدناه الفكرة.

عادةً يستخدم جيران EIGRP نفس الفاصل الزمني للترحيب ويسمي (Hello Interval) وهي الفترة الزمنية بين كل ترحيبين EIGRP. يجب أن تتلقى أجهزة التوجيه أيضاً ترحيباً من أحد الجيران خلال فترة زمنية تسمى فترة الانتظار (Hold Interval) مع إعداد افتراضي يساوي ثلاثة أضعاف فترة الترحيب(Hello Interval).
فعلى سبيل المثال تخيل أن كلا من R1 وR2 يستخدمان الإعدادات الافتراضية 5 و15 لفترات الترحيب (Hello Interval) والانتظار (Hold Interval) الخاصة بهما. في ظل الظروف العادية يتلقى R1 ترحيب من R2 كل 5 ثوان وخلال فترة الانتظار الخاصة بـ R1 وهي (15 ثانية) والتي بعدها سيعتبر R1 أن R2 قد فشل اذا لم ترده رسالة ترحيب أخرى. فإذا صار خلل في R2 فلن يقوم بإرسال رسائل الترحيب بعد وسيلاحظ R1 مرور 15 ثانية دون تلقي ترحيب من R2 وبالتالي يمكن لـ R1 اختيار مسارات جديدة لا تستخدم R2 كجهاز توجيه للقفزة التالية.
ومن المثير للاهتمام أن EIGRP لا يتطلب من جهازي توجيه متجاورين استخدام نفس الفواصل الزمنية للترحيب والانتظار ولكن من المنطقي استخدام نفس الفواصل الزمنية للترحيب والانتظار على جميع أجهزة التوجيه. وللأسف فإن هذه المرونة في استخدام إعدادات مختلفة على أجهزة التوجيه المتجاورة تسبب أحياناً منع الأجهزة المتجاورة من العمل بشكل صحيح بسبب الاختيار السيئ للفواصل الزمنية للترحيب والانتظار. فعلى سبيل المثال إذا قام R2 بتغيير فترات الترحيب/الانتظار الخاصة به إلى 30/60 بينما R1 احتفظ بفترات الترحيب/الانتظار الخاصة به 5/15 حينها سوف يعتقد R1 أن R2 قد فشل لأن R2 يرسل رسائل الترحيب كل 30 ثانية فقط في حين يتوقع R1 استلامها خلال فترة الانتظار البالغة 15 ثانية.
ملخص ميزات بروتوكول التوجيه الداخلي
يلخص الجدول أدناه الميزات التي تمت مناقشتها لـ RIPv2 وEIGRP وOSPFv2. بعد الجدول المزيد من التفاصيل بشأن كيفية عمل EIGRP.
الميزة | RIPv2 | EIGRP | OSPFv2 |
المقياس مبني على | عدد القفزات | النطاق الترددي والتأخر | التكلفة |
ارسال تحديثات كاملة خلال فاصل زمني دوري | نعم | لا | لا |
ارسال ترحيب “hello” خلال فاصل زمني دوري | لا | نعم | نعم |
يستخدم تسميم الطريق للطرق الفاشلة | نعم | نعم | نعم |
يستخدم (split horizon) للحد من التحديثات حول مسارات العمل | نعم | نعم | لا |
العنوان الذي يتم إرسال الرسائل إليه | 224.0.0.9 | 224.0.0.10 | 224.0.0.5, 224.0.0.6 |
المقياس المحدد كـ (لانهائي) | 16 | 232 – 1 | 224 – 1 |
مفاهيم وتشغيل EIGRP
هناك اختلافات واضحة جداً بين EIGRP وOSPF في بعض النواحي وهناك أوجه تشابه كثيرة أيضاً. ففي الواقع يستخدم EIGRP نموذج من ثلاث خطوات مشابهة لـ OSPF عندما ينضم جهاز التوجيه لأول مرة إلى الشبكة. تؤدي كل خطوة منهم إلى قائمة محددة أو جدول محدد وهم جدول الجوار وجدول الهيكل وجدول التوجيه. وكل هذه العمليات والجداول تؤدي في النهاية إلى بناء المسارات في جدول التوجيه، كما يلي:
1. اكتشاف الأجهزة المجاورة: ترسل أجهزة توجيه EIGRP رسائل ترحيب لاكتشاف أجهزة توجيه EIGRP المجاورة المحتملة وإجراء عمليات فحص المعلمات الأساسية لتحديد أجهزة التوجيه التي يجب أن تصبح أجهزة مجاورة. تتم إضافة الأجهزة المجاورة التي اجتازت جميع عمليات التحقق من المعلمات إلى جدول الجوار الخاص بـ EIGRP.
2. تبادل الطوبولوجيا: يتبادل الجيران تحديثات الهيكل الكاملة عند ثبوت علاقة الجوار ومن ثم التحديثات الجزئية فقط حسب الحاجة وبناءً على التغييرات في هيكل الشبكة. تتم إضافة البيانات التي تم التعرف عليها في هذه التحديثات إلى جدول هيكل EIGRP الخاص بجهاز التوجيه.
3. اختيار المسارات: يقوم كل جهاز توجيه بتحليل جداول هيكل EIGRP الخاصة به واختيار المسار الأقل قياساً للوصول إلى كل شبكة فرعية. تقوم EIGRP بوضع المسار بأفضل مقياس لكل وجهة في جدول توجيه الخاص بها.
وسنناقش لاحقاً تفاصيل كيفية قيام EIGRP ببناء جدول التوجيه الخاص به باستخدام هذه الخطوات الثلاث.
فعلى الرغم من أن العملية من المنظور الشامل والمكون من ثلاث خطوات تبدو مشابهة لـ OSPF إلا أن التفاصيل تختلف بشكل كبير خاصة تلك المتعلقة بكيفية استخدام OSPF لمنطق الـ (LS) لمعالجة بيانات الهيكل في حين أن EIGRP لا يقوم بذلك. بالإضافة إلى هذه الخطوات الثلاث، سنناقش المنطق الذي يستخدمه EIGRP عند عملية تغيير المسار والتجاوب مع التغييرات الطارئة في الشبكة وهو المنطق الفريد والذي لا يمكن رؤيته في الأنواع الأخرى من بروتوكولات التوجيه.
علاقة التجاور في EIGRP
من منظور أجهزة التوجيه يعتبر جهاز التوجيه المستخدم لـ EIGRP والمجاور هو جهاز توجيه آخر يستخدم الـ EIGRP ومتصل بشبكة فرعية مشتركة حيث يكون جهاز التوجيه الأول على استعداد أن يتبادل معه معلومات هيكل EIGRP. يستخدم EIGRP رسائل (EIGRP Hello) لاكتشاف الجيران المحتملين بشكل آلي ومن ثم إرسال هذه التحديثات إلى عنوان البث المتعدد 224.0.0.10.
وبمجرد اكتشاف جهاز توجيه EIGRP آخر باستخدام رسائل (EIGRP Hello) يجب على أجهزة التوجيه إجراء بعض عمليات التحقق الأساسية لكل جهاز مجاور محتمل (potential neighbor) قبل أن يصبح جهاز التوجيه هذا جهازاً مجاوراً لـ EIGRP. (الجار المحتمل أو الـ potential neighbor هو جهاز توجيه تم تلقي تحية EIGRP منه) ولإكمال عملية التحقق لابد من الإعدادات التالية لتحديد ما إذا كان ينبغي السماح لجهاز التوجيه بأن يكون جاراً أم لا:
■ يجب أن يجتاز عملية المصادقة في حال استخدامها.
■ يجب أن لهما نفس رقم النظام الذاتي الذي تم إعداده.
■ يجب أن يكون عنوان IP المصدر المستخدم في رسالة Hello والخاص بالجار موجود في نفس الشبكة الفرعية أي نفس عنوان الـ IP ونفس القناع لمنفذ جهاز التوجيه المحلي.
■ يجب أن تتطابق قيم EIGRP K الخاصة بأجهزة التوجيه مع أن Cisco توصي بعدم تغيير هذه القيم.
تستخدم EIGRP عمليات تحقق واضحة نسبياً للجيران. فأولاً إذا تم إعداد المصادقة فيجب أن يستخدم جهازي التوجيه نفس نوع المصادقة ونفس مفتاح المصادقة (كلمة المرور). ثانياً يتضمن إعداد EIGRP معلمة تسمى رقم النظام المستقل (ASN) autonomous system number والذي يجب أن يكون هو نفسه على جهازي توجيه مجاورين. أخيراً يجب أن تكون عناوين الـ IP المستخدمة لإرسال رسائل (EIGRP Hello) هي عناوين IP الخاصة بالمنفذ الخاص بأجهزة التوجيه والموجودة ضمن نطاق عناوين الشبكة الفرعية المتصلة بأجهزة التوجيه الأخرى.
بمجرد أن يصبح جهازي توجيه EIGRP متجاورين تستخدم أجهزة التوجيه علاقة الجوار بطرق أبسط بكثير مقارنة بـ OSPF. في حين أن جيران OSPF لديهم العديد من الحالات المؤقتة وعدد قليل من الحالات المستقرة فإن EIGRP ينتقل ببساطة إلى حالة العمل بمجرد اجتياز الجار لعمليات التحقق الأساسية وعند هذه النقطة يمكن لجهازي التوجيه البدء في تبادل معلومات الهيكل باستخدام رسائل تحديث EIGRP.
تبادل معلومات هيكل EIGRP
يستخدم EIGRP رسائل تحديث EIGRP لإرسال معلومات الهيكل إلى الأجهزة المجاورة. ويمكن إرسال رسائل التحديث هذه إلى عنوان IP متعدد البث (Multicast) 224.0.0.10 إذا كان جهاز التوجيه المرسل يحتاج إلى تحديث أجهزة توجيه متعددة على نفس الشبكة الفرعية وما عدا ذلك فيتم إرسال التحديثات إلى عنوان IP محدد (Unicast) للجهاز المجاور. (لاحظ أنه يتم إرسال رسائل الترحيب hello دائمًا إلى عنوان البث المتعدد 224.0.0.10) ويتيح استخدام حزم البث المتعدد على شبكات LAN لـ EIGRP أن تتبادل معلومات التوجيه مع جميع الأجهزة المجاورة على شبكة LAN بكفاءة.
لا تستخدم EIGRP أي من UDP أو TCP في إرسال رسائل التحديث ولكنها تستخدم بروتوكولًا يسمى (RTP) Reliable Transport Protocol والذي يوفر آلية لإعادة إرسال أي رسائل EIGRP لم يتلقاها أحد الأجهزة المجاورة. فباستخدام RTP يمكن لـ EIGRP تجنب التكرار بشكل أفضل لأن جهاز التوجيه يعرف على وجه اليقين أن جهاز التوجيه المجاور قد تلقى أي معلومات توجيه محدثة. (يعد استخدام RTP مثال آخر على الاختلاف بين بروتوكولات متجه المسافة (DV) الأساسية مثل RIP والتي ليس لديها آلية لمعرفة ما إذا كان الجيران يتلقون رسائل التحديث وEIGRP الأكثر تقدمًا)
يستخدم جيران EIGRP تحديثات التوجيه الكاملة والتحديثات الجزئية وتعني التحديثات الكاملة أن جهاز التوجيه يرسل معلومات حول جميع المسارات المعروفة بينما يتضمن التحديث الجزئي معلومات حول المسارات التي تم تغييرها مؤخراً فقط. وتحدث التحديثات الكاملة عندما يأتي الجيران لأول مرة وبعد ذلك يرسل الجيران تحديثات جزئية فقط كرد فعل على التغييرات التي تطرأ على المسار.
ويلخص الشكل أدناه العديد من التفاصيل التي تمت مناقشتها حتى الآن في فيُظهر أولاً اكتشاف الجيران باستخدام Hellos وإرسال التحديثات الكاملة والحفاظ على علاقة الجوار مع Hellos المستمرة والتحديثات الجزئية.

لاحظ أن المعلومات المتبادلة في تحديثات EIGRP والتي تشير إلى معلومات الهيكل ليست مفصلة مثل بيانات الهيكل في OSPF LS ولا تقوم بوصف كل جهاز توجيه أو رابط في الشبكة. ومع ذلك فالمعلومات تصف أكثر من مجرد المسافة (metric) ومتجه (موجه القفزة التالية) لجهاز التوجيه المحلي. يتم استخدام هذه المعلومات المضافة لمساعدة EIGRP على التجاوب مع أي تغييرات طارئة بشكل سريع ودون التسبب في حدوث دوران الحلقات.
حساب أفضل المسارات لجدول التوجيه
يقوم EIGRP بحساب قياس المسارات بشكل مختلف عن أي بروتوكول توجيه آخر. فعلى سبيل المثال فباستخدام OSPF يمكن لأي شخص لديه مخطط شبكة ومعرفة بتكاليف منفذ OSPF والتي تم إعدادها أن يقوم بحساب قياس التكلفة (cost) للـ OSPF الدقيق لكل مسار بينما تستخدم EIGRP معادلة رياضية ومقياساً مركباً والذي يجعل بدوره من الصعب التنبؤ بقيمة المقياس الدقيقة.
حساب مقياس EIGRP
يعني مقياس EIGRP المركب أن EIGRP يغذي مدخلات متعددة تسمى مكونات القياس في المعادلة الرياضية. افتراضياً يقوم EIGRP بإضافة مكونين متريين في الحساب وهما عرض النطاق الترددي والتأخير وتكون نتيجة الحساب هي قيمة عددية وتعتبر هي المقياس المركب لجهاز التوجيه هذا.
لاحظ أن EIGRP يتضمن خيارات أخرى لكيفية حساب المقياس ولكن لا يتم استخدام هذه الخيارات عادةً بحيث يدعم EIGRP أيضاً استخدام تحميل المنفذ وموثوقية المنفذ في حساب المقياس. تعلن EIGRP أيضاً عن الحد الأقصى لوحدة الإرسال (MTU) maximum transmission unit المرتبطة بالمسار والتي تعني أطول حزمة IP مسموح بها عبر المسار ولكنها لا تدعم استخدامها عند حساب المقياس. سنناقش هنا الإعدادات الافتراضية لـ EIGRP ونعمل على المقياس المركب بناءً على عرض النطاق الترددي والتأخير فقط.
تساعد صيغة حساب المقياس الخاصة بـ EIGRP في الواقع في وصف بعض النقاط الرئيسية حول المقياس المركب. الصيغة تعتبر أن الإعدادات الافتراضية المطلوب من جهاز التوجيه استخدامها هي النطاق الترددي والتأخير فقط كما يلي:

في هذه الصيغة يمثل مصطلح النطاق الترددي الأقل (least-bandwidth) رابط النطاق الترددي الأدنى في المسار باستخدام وحدة كيلوبت في الثانية. على سبيل المثال إذا كان أبطأ رابط في المسار هو رابط Ethernet بسرعة 10 ميجابت في الثانية فإن الجزء الأول من الصيغة هو 107/104 وهو ما يساوي 1000. وتم استخدام 104 في الصيغة لأن 10 ميجابت في الثانية تساوي 10000 كيلوبت في الثانية (104 كيلوبت في الثانية).
قيمة التأخير التراكمي (cumulative-delay) والمستخدمة في الصيغة هي مجموع كل قيم التأخير لجميع المنافذ المُصدِرة للحزم في المسار وذلك بوحدة عشرات الميكروثانية (tens of microseconds).
يساعد استخدام هذين المدخلين EIGRP في اختيار أفضل مسار مع توازن أكبر قليلًا من OSPF. فيتيح استخدام أقل عرض نطاق ترددي لـ EIGRP تجنب المسارات ذات الروابط الفردية الأبطأ والتي عادةً ما تكون الروابط الأكثر ازدحامًا. وفي الوقت نفسه يضيف الجزء الخاص بالتأخير في المعادلة قيمة التأخير لكل رابط بحيث تكون المسارات التي تحتوي على عدد أكبر من الروابط هي الأقل رغبة نسبياً من المسارات التي تحتوي روابط أقل.
ويمكن ضبط كل من عرض النطاق الترددي والتأخير لكل رابط باستخدام الأوامر الفرعية المسماة (bandwidth) و (delay).
مثال على حساب مقاييس EIGRP
الآن وبعد وضوح فكرة كيفية عمل حسابات EIGRP الخاصة بجهاز التوجيه نطبق ذلك في مثال يربط ما يتعلمه جهاز التوجيه في رسالة تحديث EIGRP والإعدادات المحلية وحساب المقياس لمسار واحد.
لحساب المقياس يجب على جهاز التوجيه أن يأخذ في الاعتبار المعلومات الواردة من جهاز التوجيه المجاور بالإضافة إلى إعدادات المنفذ المحلية الخاصة به. أولاً تُظهر رسائل تحديث EIGRP رقم الشبكة الفرعية والقناع بالإضافة إلى جميع مكونات المقياس: التأخير التراكمي والحد الأدنى لعرض النطاق الترددي بالإضافة إلى مكونات المقياس الأخرى والغير مستخدمة عادةً. بعد ذلك يأخذ جهاز التوجيه المحلي في الاعتبار إعدادات النطاق الترددي والتأخير على المنفذ والتي تم تلقي التحديث عليها ويقوم بحساب مقياس جديد.
يوضح الشكل أدناه أن جهاز التوجيه R1 يتعرف على الشبكة الفرعية 10.1.3.0/24 من جهاز التوجيه R2. تُظهر رسالة تحديث EIGRP من R2 حدًا أدنى لعرض النطاق الترددي قدره 100000 كيلوبت في الثانية وتأخير تراكمي قدره 100 ميكروثانية. ويحتوي منفذ S0/1 الخاص بـ R1 على عرض نطاق ترددي للمنفذ مضبوط على 1544 كيلوبت في الثانية وهو عرض النطاق الترددي الافتراضي على رابط تسلسلي وتأخير قدره 20000 ميكروثانية.

وهنا اكتشف R1 أن عرض النطاق الترددي للمنفذS0/1 هو 1544 كيلوبت في الثانية أو 1.544 ميجابت في الثانية وهو أقل من الحد الأدنى لعرض النطاق الترددي المُعلن عنه وهو 100000 كيلوبت في الثانية أو 100 ميجابت في الثانية. يحتاج R1 إلى استخدام هذا النطاق الترددي الجديد الأبطأ في حساب المقياس. لاحظ أنه لو كان منفذ S0/1 الخاص بـ R1 يحتوي على عرض نطاق ترددي يبلغ 100000 كيلوبت في الثانية أو أكثر فسيستخدم R1 بدلاً من ذلك الحد الأدنى من عرض النطاق الترددي المدرج في تحديث EIGRP من R2.
بالنسبة لتأخير المنفذ يضيف جهاز التوجيه دائماً تأخير المنفذ الخاص به إلى التأخير المدرج في تحديث EIGRP. ومع ذلك يمكن أن تشكل الوحدة المستخدمة في التأخير تحدياً كبيراً. فالوحدات واستخدامها هي كما يلي:
وحدة الميكروثانية: مدرجة في مخرجات أوامر show مثل :
show interface
show ip eigrp topology
وكذلك في رسائل تحديث EIGRP
وحدة عشرات الميكروثانية: يتم استخدامها بواسطة أمر إعداد وضع المنفذ (delay) والتي يتم من خلالها ضبط التأخير وفي حساب مقياس EIGRP
وبسبب هذا الاختلاف في الوحدات فعند النظر إلى التأخير يجب التأكد من إبقاء الوحدات متوافقة. ففي هذا المثال:
■ تلقى R1 تحديث يُظهر تأخير قدره 100 (ميكروثانية) والذي يحوله R1 إلى ما يعادل 10 عشرات من الميكروثانية قبل استخدامه في الصيغة.
■ يرى الموجه R1 أن إعداد الواجهة S0/1 الخاص به يبلغ 20000 ميكروثانية وهو ما يعادل 2000 عشرة ميكروثانية
■ ولأغراض الحساب يضيف R1 القيمة 10 عشرات ميكروثانية من رسالة التحديث إلى 2000 عشرة ميكروثانية للمنفذ ليكون التأخير الإجمالي قدره 2010 عشرة ميكروثانية.
يؤدي هذا المثال إلى حساب المقياس التالي:

في حالة وجود مسارات متعددة محتملة للشبكة الفرعية 10.1.3.0/24 سيقوم جهاز التوجيه R1 أيضاً بحساب مقياس تلك المسارات واختيار المسار الذي يحتوي على أفضل (أقل) مقياس لإضافته إلى جدول التوجيه.
تحذيرات بشأن النطاق الترددي على الروابط التسلسلية
يمنح مقياس EIGRP القوي القدرة على اختيار المسارات التي تتضمن المزيد من قفزات أجهزة التوجيه ولكن مع روابط أسرع. ومع ذلك ولضمان اختيار المسارات الصحيحة يجب على المهندسين الاهتمام بإعدادات النطاق الترددي والتأخير. فعلى وجه الخصوص تكون الروابط التسلسلية الافتراضية ذات عرض نطاق ترددي قيمته 1544 وتأخير قدره 20000 ميكروثانية كما هو مستخدم في المثال السابق. ولا يستطيع نظام IOS تغيير إعدادات النطاق الترددي والتأخير بشكل تلقائي بناءً على سرعة الطبقة الأولى للارتباط التسلسلي ولذلك فإن استخدام إعدادات النطاق الترددي والتأخير الافتراضية وخاصة على الارتباطات التسلسلية يمكن أن يؤدي إلى حدوث مشاكل.
يوضح الشكل أدناه مشكلة استخدام إعدادات النطاق الترددي الافتراضية وكيف يستخدم EIGRP المسار الأفضل (الأسرع) عندما يتم تعيين النطاق الترددي بشكل صحيح. يركز الشكل على مسار جهاز التوجيه B إلى الشبكة الفرعية 10.1.1.0/24 ففي الجانب الأيسر من الشكل تستخدم جميع المنافذ التسلسلية الإعدادات الافتراضية على الرغم من أن الارتباط التسلسلي العلوي يعمل فعلياً بسرعة بطيئة تبلغ 64 كيلوبت في الثانية بينما يوضح الجانب الأيمن من الشكل النتائج عند تغيير أمر (bandwidth) للارتباط التسلسلي البطيء ليعكس السرعة (البطيئة) الصحيحة.

بشكل عام تتمثل الإستراتيجية الجيدة للشبكات التي تستخدم مقياس EIGRP في تعيين عرض النطاق الترددي للـ WAN ليتوافق مع سرعة الطبقة الأولى الفعلية واستخدام الإعدادات الافتراضية لواجهات LAN وعادةً ما تختار EIGRP أفضل المسارات.
استجابة EIGRP للتغييرات الطارئة
بعد الاطلاع على كيفية إعداد EIGRP لعلاقات الجوار وتبادل معلومات التوجيه وحساب أفضل مسار فيبقى التعرف على عمل EIGRP للإستجابة الطارئة لتغيير المسارات مع مسارات جديد وبدون الدوران في الحلقات.
يشكل تجنب الدخول في دوران الحلقات إحدى أصعب المشاكل في أي بروتوكول توجيه ديناميكي. تتغلب بروتوكولات متجه المسافة (DV) على هذه المشكلة باستخدام مجموعة متنوعة من الأدوات بعضها ينشئ يتسبب بشكل كبير في مزيد من الوقت للاستجابة للأحداث الطارئة في تغيير المسارات والذي يصل إلى دقائق طويلة عن فشل الارتباط. بينما تتغلب بروتوكولات حالة الارتباط (LS) على هذه المشكلة من خلال جعل كل جهاز توجيه يحتفظ ببنية كاملة للشبكة لذلك من خلال تفعيل نموذج رياضي معين (مثل خوارزمية SPF الخاصة بـ OSPF) يمكن للموجه تجنب الدخول في دوران الحلقات.
يتجنب EIGRP الدخول في دوران الحلقات عن طريق الاحتفاظ ببعض المعلومات الأساسية عن البنية للشبكة وهي أقل بكثير مقارنة ببروتوكولات OSPF. فتحتفظ EIGRP بسجل لكل جهاز توجيه للقفزة التالية المحتملة للمسارات البديلة وبعض تفاصيل المقياس المتعلقة بتلك المسارات ولكن لا توجد معلومات حول البنية بعد القفزة التالية. لا تتطلب هذه المعلومات المتناثرة عن الهيكل أي خوارزمية لإجراء الحسابات ولكنها تسمح بالاستجابة السريعة للوصول إلى المسارات الخالية من دوران الحلقات.
المسافة الممكنة (Feasible) والمسافة المبلغ عنها (Reported)
أولاً قبل الدخول في تفاصيل كيفية الاستجابة للحالات الطارئة وتعديل المسارات في EIGRP يجب التعرف على بعض مصطلحات EIGRP الإضافية. فباستخدام EIGRP يحتاج جهاز التوجيه المحلي إلى مراعاة القياس المحسوب الخاص به لكل مسار ولكن في الوقت نفسه يأخذ جهاز التوجيه المحلي في الاعتبار القياس المحسوب لجهاز توجيه القفزة التالية لنفس الشبكة الفرعية للوجهة. ولدى EIGRP شروط خاصة لتلك المقاييس كما يلي:
■ المسافة الممكنة (FD): وهي المقياس المركب لجهاز التوجيه المحلي لأفضل طريق للوصول إلى شبكة فرعية كما تم حسابه على جهاز التوجيه المحلي.
■ المسافة المبلغ عنها (RD): وهي أفضل مقياس مركب لجهاز توجيه القفزة التالية لنفس الشبكة الفرعية.
وللتوضيح وباستخدام نفس المثال السابق يوضح الشكل أدناه عمليتين حسابيتين قام بهما R1. وجدت إحدى العمليات الحسابية مقياس R1 الخاص (FD) لمساره الوحيد للشبكة الفرعية 10.1.3.0/24 وذلك كما تمت مناقشته سابقاً. بينما تستخدم العملية الحسابية الأخرى مكونات المقياس في التحديث المستلم من R2 وذلك لحساب ما كان R2 سيحسبه لمقياسه للوصول إلى نفس الشبكة الفرعية. فالحساب الثاني لـ R1 مستند إلى معلومات R2 وهو RD الخاص بـ R1 لهذا المسار.

باتباع الخطوات الموجودة في الصورة:
1. يحسب R2 مقياسه الخاص (FD) لمسار R2 لـ 10.1.3.0/24 استنادًا إلى عرض نطاق ترددي يبلغ 100000 كيلوبت في الثانية وتأخير قدره 100 ميكروثانية.
2. يرسل R2 تحديث EIGRP الذي يُظهر 10.1.3.0/24 مع نفس مكونات القياس.
3. يقوم R1 بحساب RD لهذا المسار باستخدام نفس طريقة حساب R2 والمستخدمة في الخطوة 1 باستخدام والمعلومات الموجودة في رسالة التحديث من الخطوة 2.
4. يحسب R1 مقياسه الخاص من خلال النظر في عرض النطاق الترددي والتأخير للمنفذ S0/1 كما تمت مناقشته سابقًا.
في الواقع واستنادًا إلى المعلومات الواردة في الشكل السابق يمكن بسهولة حساب FD الخاص بـ R2 للوصول إلى الشبكة الفرعية 10.1.3.0/24 وهو أيضاً RD الخاص بـ R1 للوصول إلى 10.1.3.0/24 :

في هذه المرحلة يعرف R1 مقياسه المحسوب الخاص به للمسار والذي يسمى FD ويعرف R1 قياس جهاز توجيه الخطوة التالية R2 لمسار R2 إلى نفس الشبكة الفرعية والذي يسمى RD.
والآن وبعد معرفة مفهومي FD وRD نعود إلى كيفية قيام EIGRP بالاستجابة للتغيرات الطارئة وإعادة بناء مساراته. يعتمد المنطق هنا على فرعين وذلك استناداً على ما إذا كان المسار الفاشل يمتلك مسار بديل أم لا. يعتمد القرار بشأن ما إذا كان جهاز التوجيه لديه مسار بديل ممكن على قيم FD وRD للمسارات المتنافسة للوصول إلى شبكة فرعية معينة.
مسارات EIGRP والمسارات البديلة الممكنة
تقوم EIGRP بحساب المقياس لكل مسار للوصول إلى كل شبكة فرعية. بالنسبة لشبكة فرعية معينة يُطلق على المسار الذي يتمتع بأفضل قياس اسم المسار (successor) حيث يقوم جهاز التوجيه بإدراجه ضمن جدول التوجيه ويُطلق على مقياس هذا المسار المسافة الممكنة (FD) كما مر معنا سابقًا.
ومن بين المسارات الأخرى للوصول إلى نفس الشبكة الفرعية توجد المسارات التي كانت مقاييسها أكبر من FD للمسار المختار ويحتاج EIGRP إلى تحديد المسار البديل الذي يمكن استخدامه على الفور في حالة فشل المسار الأفضل حاليًا وذلك دون التسبب في حلقات دوران.
تقوم EIGRP بتشغيل خوارزمية بسيطة لتحديد المسارات التي يمكن استخدامها مع الاحتفاظ بمسارات النسخ الاحتياطي الخالية من الحلقات في جدول الهيكل الخاص بها واستخدامها في حالة فشل المسار الأفضل حاليًا. تُسمى هذه المسارات البديلة القابلة للاستخدام على الفور بالمسارات البديلة (feasible successor) لأنه من الممكن استخدامها كمسار جديد عند فشل المسار السابق.
يحدد جهاز التوجيه ما إذا كان المسار هو مسار ممكن وذلك بناءً على شرط وهو إذا كان RD للمسار الجديد أقل من FD فإن المسار هو مسار بديل ممكن.
وللتوضيح يبدأ الشكل أدناه مثالاً يختار فيه جهاز التوجيه E أفضل مسار له إلى الشبكة الفرعية 1. ويتعرف جهاز التوجيه E على ثلاثة مسارات إلى تلك الشبكة مع موجهات القفزة التالية B وC وD. ويوضح الشكل كذلك المقاييس كما تم حسابها على جهاز التوجيه E كما هو مدرج في جدول هيكل EIGRP لجهاز التوجيه E. يجد جهاز التوجيه E أن المسار عبر جهاز التوجيه D يحتوي على أدنى مقياس مما يجعله هو المسار لجهاز التوجيه E للشبكة الفرعية 1. يضيف جهاز التوجيه E هذا المسار إلى جدول التوجيه الخاص به كما هو موضح. قيمة الـ FD المحسوب لهذا المسار هو 14000 في هذه الحالة.

وفي الوقت نفسه يقرر ويحدد EIGRP على جهاز التوجيه E أي من المسارين الآخرين إلى الشبكة الفرعية 1 سيستخدمه على الفور في حالة فشل المسار عبر جهاز التوجيه D لأي سبب من الأسباب. يمكن استخدام المسار البديل المناسب فقط والذي يجب أن يوفي بالشرط : يجب أن يكون RD للمسار البديل أقل من FD للمسار الجديد البديل.
يوضح الشكل أدناه أن أحد المسارين الآخرين يفي بالشرط وبالتالي فهو مسار بديل ممكن. ويبين الشكل نسخة محدثة من الشكل السابق. يستخدم جهاز التوجيه E المنطق التالي لتحديد أن المسار عبر جهاز التوجيه B ليس مسارًا بديل ممكن بخلاف المسار عبر جهاز التوجيه C كما يلي:
■ يقوم جهاز التوجيه E بمقارنة FD البالغ 14000 مع RD للمسار عبر جهاز التوجيه B والبالغ 15000 يعد RD الخاص بجهاز التوجيه B أسوأ من FD الخاص بجهاز التوجيه E لذا فإن هذا المسار ليس بديلاً ممكنًا.
■ يقوم جهاز التوجيه E بمقارنة FD البالغ 14000 مع RD للمسار عبر جهاز التوجيه C والبالغ 13000 يعد RD الخاص بجهاز التوجيه C أفضل من FD الخاص بجهاز التوجيه E مما يجعل هذا المسار بديلاً ممكنًا.

إذا فشل المسار إلى الشبكة الفرعية 1 عبر جهاز التوجيه D فيمكن لجهاز التوجيه E وضع المسار عبر جهاز التوجيه C على الفور في جدول التوجيه دون خوف من الدخول في حلقة دوران. وتتم الاستجابة على الفور تقريباً في هذه الحالة.
عملية الاستعلام (Query) والرد (Reply)
عندما يفشل المسار ولا يكون للمسار مسار بديل ممكن تستخدم EIGRP خوارزمية تسمى خوارزمية التحديث المنتشر (DUAL) Diffusing Update Algorithm وذلك لاختيار مسار بديل. فترسل DUAL استعلامات تبحث عن مسار خالٍ من الحلقات إلى الشبكة الفرعية المعنية وعند العثور على المسار الجديد تقوم DUAL بإضافته إلى جدول التوجيه.
تستخدم عملية EIGRP DUAL ببساطة فكرة الرسائل للتأكد من وجود المسار ولن تقوم بالدخول في حلقة دوران فقبل أن تقرر استبدال المسار الفاشل بمسار بديل على سبيل المثال في الشكل السابق تخيل أن كلا الموجهين C وD يفشلان. لا يحتوي جهاز التوجيه E على أي مسار بديل ممكن للشبكة الفرعية 1 ولكن يوجد مسار واضح متاح فعليًا من خلال جهاز التوجيه B فلأجل استخدام هذا المسار يرسل جهاز التوجيه E رسائل استعلام (EIGRP query) إلى جيرانه العاملين وفي هذه الحالة هو فقط جهاز التوجيه B. لأنه لا يزال مسار جهاز التوجيه B إلى الشبكة الفرعية 1 يعمل بشكل جيد ولذلك يرد جهاز التوجيه B على جهاز التوجيه E برسالة رد (EIGRP reply) وفيها ذكر تفاصيل المسار إلى الشبكة الفرعية 1 والتأكيد على أنه لا يزال يعمل. يستطيع جهاز التوجيه E بعد ذلك إضافة مسار جديد إلى الشبكة الفرعية 1 إلى جدول التوجيه الخاص به دون الخوف من تكرار التكرار.
يستغرق استبدال المسار الفاشل بمسار بديل وقت قصير جدًا عادةً أقل من ثانية أو ثانيتين. بينما عندما تكون رسائل الاستعلامات والردود مطلوبة يمكن أن يستغرق الموضوع وقت أطول قليلاً وهو في معظم الشبكات يحدث في أقل من 10 ثوان.